SBDQ-02电气控制测试台
电气控制测试台、机电控制实验室设备是基于S7-300PLC的西门子先进自动化实验室,改变传统的以单一PLC为基础的实验模式,通过PROFIBUS、PROFINET将PLC的控制技术、工业通讯技术整合在一起,并且配备实际的被控对象,使学生能够模拟实际工业自动化领域的控制,为其提供PLC应用技术良好的实践平台。结合开设的课程,阐述实验项目的设计思路。通过实验教学的实践证明,该实验室可以任意组合,实现需要的控制体系配置方案,满足多个课程的实验教学需要。
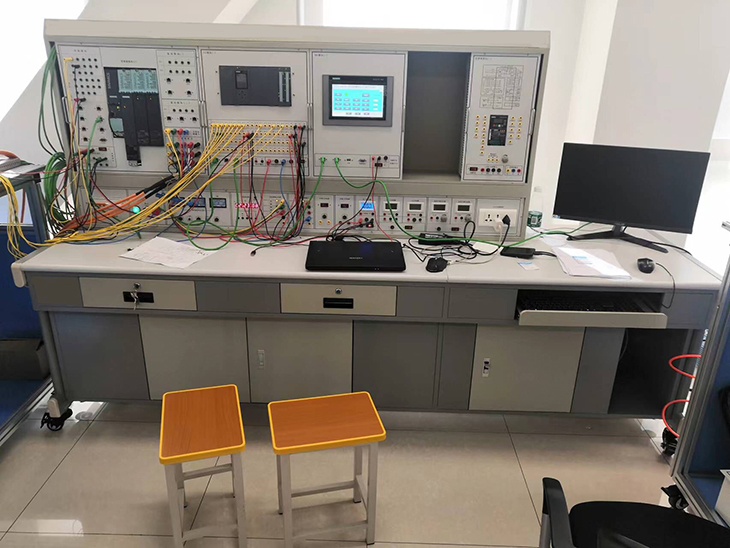
4.2主控制台
1)设备实训台
实训桌为铁质双层亚光密纹喷塑结构,桌面为防火、防水、耐磨高密度板、结构坚固,造型美观大方。桌子左右各设有两个抽屉(带锁),并带有柜子,分别可放置挂件和实训物品底部装有4个导向轮,方便实训台架移动, 分拣模块、机械手模块、三轴运动、机械传动模块可以放置在实训台上,整体结构为开放式和可拆装式。外形尺寸为:2500mm×700mm×1500 mm。
参考图
2)主要技术参数
a.供电电源:三相五线 380V±5% 50Hz;
b.使用功率:≤12.0kW;
c.框架材料:半弧形铝合金立柱框架;
d.桌面材料:高密度压缩板材制作,表面具有防静电桌垫;
e.封板材料:优质钣金;
f.通讯方式:以太网,profinet总线通讯
g.实验台尺寸:约2500mm*700mm*1500mm。
3)设备配置
a.主控制台电气元器件布置合理,线路敷设"横平竖直",人机界面友好。
b.主控制台可编程控制器,电机控制器的控制IO端子,控制端子引至面板,输入端子采用用线快速插接,输出端子采用指示灯,实现控制功能,并配备20%冗余接线。
c.分拣模块、机械手模块、三轴运动、机械传动等4个分系统分别独立运行,也可以联机运行;
d.4个分系统触摸屏(HMI),可编程控制器(PLC)和电机控制器(变频器,伺服控制器,步进控制器)等安装至主控制台。
e.配备主控制台元器件之间、主控制台与4个分系统之间的电力,控制,通讯等连接接口及线缆。
f.配备可编程控制器及电机控制器与调试软件连接的通讯电缆。
g.主控备采用模块化结构,即 PLC 主机、触摸屏及各种场景控制单元,均为挂箱式,可根据实验项目、网络要求进行组合, 以后如果需要增加实验,只需添加部件即可。信号接口通过端子排引出到面板,避免长期训练,损坏PLC主机自身的端子。
h.实训导线:配备护套结构手枪插连接线,无氧铜抽丝而成插头采用实芯铜质件外套铍轻铜弹片,强弱电导线的插头插座尺寸分开。
i. 场景实训桌:采用铝合金导轨式实训台,以经氧化处理的高材质40mm×40mm、20mm×80mm铝合金作为设备主要框架材料,底部装有4个导向轮,方便实训台架移动,整体结构为开放式和可拆装式。
4)主要配置清单
|
序号 |
名称 |
型号 |
数量 |
|
1 |
工作台1 |
1、交流电源控制单元 三相四线380V交流电源经空气开关后给装置供电,电网电压表监控电网电压,设有带灯保险丝保护,控制屏的供电由钥匙开关和启停开关控制,同时具有漏电告警指示及告警复位。 提供三相四线380V、单相220V电源各一组,由启停开关控制输出,并设有保险丝保护。 2、定时器兼报警记录仪 定时器兼报警记录仪,平时作时钟使用,具有设定时间、定时报警、切断电源等功能;还可自动记录由于接线或操作错误所造成的漏电告警次数。 3、直流电源、直流电压/电流表、直流电压:0~10V可调输出;直流电流:4~20mA可调输出;直流数字电压表/电流表;电压表量程0~200V、输入阻抗为10MΩ、精度0.5级;电流表量程0~200 mA、精度0.5级; 2.使用功率:12.0KW 4.框架材料:铁质双层亚光密纹喷塑结构; 4.桌面材料:高密度压缩板材制作,表面具有防静电桌垫; 5.封板材料:优质钣金; 6.通讯方式:以太网; 7.尺寸约:2500mm*700mm*1500mm。 |
1套 |
|
3 |
开关电源 |
输入:AC220V 50HZ;输出:DC24V 5A;具有电流过载保护功能。 |
1只 |
|
4 |
PLC主机1 |
1517T PLC |
1 |
|
5 |
PLC主机2 |
1217C |
1 |
|
6 |
PLC主机3 |
ST60 |
1 |
|
7 |
触摸屏1 |
精智触摸屏 |
1套 |
|
8 |
触摸屏2 |
精简触摸屏 |
1套 |
|
9 |
触摸屏3 |
SAMR V4 |
1套 |
|
10 |
G120变频器 |
G120变频器 |
1套 |
|
12 |
S120 |
S120变频器 |
3 |
|
13 |
步进控制器 |
57步进驱动器 |
1 |
|
14 |
V20变频器 |
1 |
|
|
22 |
交流空开 |
4P40A |
1只 |
|
23 |
熔断器座 |
RT18-32X |
2只 |
|
24 |
熔断器 |
15A |
2只 |
|
25 |
模数化插座 |
三芯 10A |
1只 |
|
26 |
插头 |
三芯 10A |
1只 |
|
27 |
中间继电器+底座 |
DC24V MY4N-J |
4套 |
|
28 |
启动按钮 |
DC24V 绿色 Φ22开孔 |
1只 |
|
29 |
停止按钮 |
DC24V 红色 Φ22开孔 |
1只 |
|
30 |
急停按钮 |
DC24V 红色 Φ22开孔 |
4只 |
|
31 |
电压表 |
0-10V |
1只 |
|
32 |
电流表 |
4-20mA |
1只 |
|
33 |
电压表 |
AC220V |
3只 |
|
34 |
场景模型 |
材料分拣模型 |
1套 |
|
三轴运动控制模型 |
1套 |
||
|
机械手模型 |
1套 |
||
|
机械传动模型 |
1套 |
||
|
35 |
工业交换机 |
8口 |
1套 |
|
36 |
基础控制单元 |
复位按钮4个、自锁按钮4个,指示灯(黄绿红个4个)旋钮开关4个,急停4个,所有按钮开孔16,指示灯电压DC24V, |
1套 |
4.3材料分拣场景
1)场景介绍
材料分拣分系统采用台式结构,配传感器(光电式、电感式、颜色、磁感应式)、旋转编码器、单相交流电动机、输送带、电磁阀,减压阀,空气滤清器,气压指示表等。是一套模拟工业自动化生产物料分拣过程的微缩模型,可以实现不同材料的自动分选和归类,并可上位计算机监控。

2)实训内容
a.PLC与变频器通讯及控制
b.异步电机的变频器调速
c.变频器的位置控制
d.各类传感器接线及使用调整
e.电气传动和气动技术
3)主要控制要求
a.系统通过各种传感器,能自动实现黑色尼龙块,白色尼龙块,铝块(金属)三种物料的识别,并进行分拣,同时实现计数功能。
b.通过PLC的模拟量输出作为变频器速度给定,实现电机无极调速;
c.配置手动、自动切换和触摸屏控制开关;
d.在手动控制模式,可以使用按钮实现电机的点动控制,气缸动作等,触摸屏可设置点动速度;
e.在触摸屏控制模式,可以使用触摸屏进行电机的点动控制,气缸动作等,并可设置点动速度;
f.在自动模式下,运输带按照给点速度运转,通过传感器自动识别物块,气缸自动将其推送至指定的分拣位置。
g.在触摸屏和指示灯,准确显示各物体运行状态,在触摸屏显示各分拣块计数和总计数情况;
h.所有模式下,触摸屏都能显示或标识分拣系统的运行状态;
i.在控制台和分系统都设置紧急按钮,切断电源;
4)网络控制框图
材料分拣系统通过触摸屏(HMI)、可编程控制器(PLC)、变频器、电机、编码器等组成(控制框图如下图1.1),其中触摸屏,可编程控制器,变频器等安装在主控制台,电机、传感器等其他部件安装在材料分拣系统上。

图1.1 材料分拣控制框图
5)主要配置
|
序号 |
名称 |
型号 |
数量 |
单位 |
备注 |
|
1 |
三相异步电机 |
4IK25GN-Y+4GN7.5K17-02-14X |
1 |
台 |
|
|
2 |
光电传感器 |
JD-E45-5L/JD-E45-T5NK |
1 |
件 |
对射光电,计数 |
|
3 |
光电传感器 |
SE01-1K |
1 |
件 |
判断颜色(黑白) |
|
4 |
电感传感器 |
J18-D8NK |
1 |
件 |
检测金属 |
|
5 |
电容传感器 |
LJC18A3-B-Z/BX |
2 |
件 |
物料检测,黑色检测 |
|
6 |
基座 |
定制 |
1 |
套 |
|
|
7 |
物料块 |
|
9 |
件 |
3个黑尼龙块,3个白尼龙块,3级铝块 |
|
8 |
单杆气缸 |
CDJ2KB16-100 |
3 |
件 |
用于推料 |
|
9 |
电磁阀 |
SY5120-5LZE-01 |
3 |
件 |
控制气缸 |
|
10 |
气源过滤器 |
AW3000-03 |
1 |
件 |
过滤空气 |
|
11 |
磁性开关 |
CS1-M |
6 |
件 |
判断气缸的位置 |
|
12 |
铝材 |
3030 |
1 |
套 |
|
|
13 |
加工件 |
定制 |
1 |
件 |
|
|
14 |
皮带 |
长1014mm宽98mm厚2mm |
1 |
件 |
|
|
15 |
编码器 |
E6B2-CWZ6C 1000P/R |
1 |
件 |
|
|
16 |
压力传感器 |
FK-P300-E |
1 |
件 |
|
|
17 |
温度传感器 |
PT100 |
1 |
件 |
|
|
18 |
气泵 |
550-25(45/7) |
1 |
台 |
|
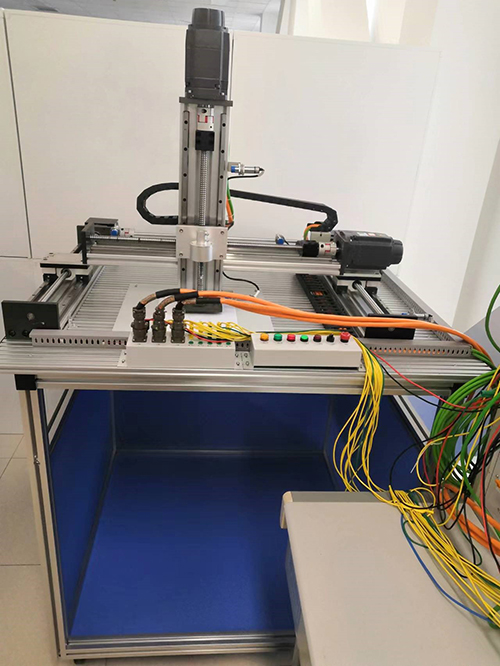
4.4三轴运动控制
1)场景介绍
三轴运动控制分系统采用台式结构,利用三维空间内对物体运动进行控制,在三个方向上进行独立控制,通常是通过三个互相垂直的轴来实现,分别是X、Y、Z轴。X轴通常代表前后方向,Y轴代表左右方向,Z轴代表上下方向。通过配置触摸屏(HMI),带运动控制功能可编程控制器(PLC),伺服控制器,伺服电机,编码器、滚珠丝杆等部分组成,可以实现不同材料的自动分选和归类,并可上位计算机监控。
2)实训内容
a.伺服系统的组成和基本操作
b.伺服驱动器的试运行
c.伺服驱动器的位置控制模式
d.可编程控制器指令编程
e.单轴定位运动控制
f.二维双轴定位运动控制
g.直线插补运动控制
h.圆弧插补运动控制
3)主要控制要求
a.设置自动控制、手动控制和触摸屏控制切换开关;
b.PLC通过报文的形式与伺服控制通讯,控制伺服控制系统;
c.在手动模式和触摸屏控制模式下,能设置自动回参考点;
d.在手动模式下,可以实现三轴六个方向的点动运行,在触摸屏设置三个轴的运行速度;
e.在触摸屏模式下,可以实现三轴六个方向的点动运行,设置三个轴的运行速度;
f.通过伺服电机上的编码器实现速度和位置的闭环控制;
g.三个方向设置软限位和硬限位,软限位报警,硬限位停机;
h.在自动模式下,使用触摸屏,可控制画笔绘画出各种预制的图形。
i.所有模式下,触摸屏都能显示或标识三轴运动控制系统的运行状态;
j.在控制台和分系统都设置紧急按钮,切断电源;
k.不同半径圆形绘制
l.不同半径扇形绘制
m.四叶轮绘制
n.五角星绘制
o.六边形绘制
p.三角形绘制
q.四连环绘制
r.多段运动轨迹绘制
4)网络控制框图
三轴运动控制系统通过触摸屏(HMI)、带运动控制功能可编程控制器(PLC)、伺服控制器、伺服电机、编码器、滚珠丝杠、滑块等组成(控制框图如下图2.2),其中触摸屏,可编程控制器等安装在主控制台,伺服控制器、伺服电机、滚珠丝杠等其他部件安装在材料三轴运动控制分系统上。

图2.2三轴运动控制框图
5)主要配置
|
序号 |
名称 |
型号 |
数量 |
单位 |
备注 |
|
1 |
伺服电机 |
1FK37032-xAK7x-xRAx |
3 |
套 |
Drive-cliqAM20 多圈 |
|
2 |
滚珠丝杆 |
有效行程500mm |
2 |
套 |
|
|
3 |
直线滑块 |
540mm |
2 |
套 |
|
|
4 |
滚珠丝杆 |
有效行程 300mm |
1 |
套 |
|
|
5 |
直线滑块 |
340mm |
1 |
套 |
|
|
6 |
电感传感器 |
|
9 |
套 |
3个轴限位及定位 |
|
7 |
基座 |
定制 |
1 |
套 |
|
|
8 |
加工件 |
定制 |
1 |
套 |
|
|
9 |
紧急开关 |
|
1 |
个 |
|
|
10 |
写字笔 |
定制 |
1 |
个 |
|
4.5机械手场景
1)场景介绍
机械手分系统采用台式结构。机械手通常由机械结构、电气控制和编程控制器三部分组成,机械机构包括机械臂、关节、未端执行器等部分,通过电动机,减速器和传感器等电气控制器的控制联动。编程控制则是通过计算机控制机械手的运动轨迹,姿态、速度等,从而实现自动化作业。

2)实训内容
a.气动元件的结构及工作原理
b.步进电机控制原理
c.PLC脉冲控制步进电机正反转调速及运行位移;
d.编码器实现速度和位移的闭环控制
e.系统维护和故障检测技术
3)主要控制要求
a.通过PLC自带高速输入点通过脉冲控制步进电机正反调速和位置控制;
b.通过旋转编码器实现速度和位置闭环反馈;
c.设置位置参考点;
d.运动方向上设置硬限位,软限位,运动至软限位报警,运动至硬限位停车;
e.设置手动、自动控制和触控屏控制切换;
f.在手动控制模式下,用按钮进行电机点动、卡爪上升、卡爪旋转和卡爪的抓放等动作,在触摸屏调整点动速度;
g.在触摸屏模式下,在触摸屏上进行电机点动、卡爪上升、卡爪旋转和卡爪的抓放等动作,还能调整点动速度;
h.在自动控制模式下,能自动执行抓"物块",按照预定的速度,运行至指定地方,并且将物块放在指定位置,机械手回到坐标参考点;
i.所有模式下,触摸屏都能显示或标识机械手的运行状态;
j.在控制台和分系统都设置紧急按钮,切断电源;
4)网络控制框图
机械手控制分系统通过触摸屏(HMI)、可编程控制器(PLC)、步进控制器、步进电机、编码器、旋转气缸、升降气缸、电磁阀等组成(控制框图如下图3.3),其中触摸屏,可编程控制器等安装在主控制台,步进控制器、步进电机、电磁阀等其他部件安装在材料机械手控制分系统上。

图3.3机械手控制框图
5)主要配置
|
序号 |
名称 |
数量 |
单位 |
|
13 |
步进电机 |
1 |
台 |
|
15 |
电感传感器 |
1 |
件 |
|
16 |
电容传感器 |
2 |
件 |
|
17 |
基座 |
1 |
套 |
|
18 |
物料块 |
4 |
件 |
|
19 |
双杆气缸 |
1 |
件 |
|
20 |
旋转气缸 |
1 |
件 |
|
21 |
升降气缸 |
1 |
件 |
|
22 |
夹爪 |
1 |
件 |
|
23 |
电磁阀 |
4 |
件 |
|
24 |
气源过滤器 |
1 |
件 |
|
25 |
磁性开关 |
6 |
件 |
|
26 |
铝材 |
1 |
套 |
|
27 |
加工件 |
1 |
件 |
|
28 |
丝杠 |
1 |
套 |
|
29 |
编码器 |
1 |
件 |
|
30 |
压力传感器 |
1 |
件 |
|
31 |
直线轴承 |
2 |
件 |
4.6机械传动场景
1)场景介绍
1、机械传动配置及主要技术参数;备有30种162个自制零部件、20种标准件及8种外购件,还有4种5件拼装工具。箱内大部分零件采用硬铝合金精制,加工精度高,使用轻巧方便,工作台面板为带T形槽硬铝型材制作,组装方便快速。各种零件的名称、数量及主要技术参数如附表所示。
2、拚装方案:利用配备的零部件可组装数十种机械传动方案
主要有:
(1)单级传动:V带传动、链传动、圆柱齿轮传动、圆锥齿轮传动、槽轮机构、单十字万向联轴器传动等。
(2)变速器:参照CA6132车床变速器设计。
手动滑动套,使两三联齿轮分别沿二根花键轴滑移,通过三根传动轴(二根花键轴及一根平键轴)上不同的齿轮啮合,可得9级传动比。三根传动轴可三角形布置,也可展开布置。卸下平键轴,装上中介轮轴及介轮,可得含介轮的齿轮传动。
(3)多级组合传动:可在上述单级传动及变速器中任选两种或两种以上,用联轴器或离合器联接组成多级组合传动。
例如:手轮-V带-槽轮机构组合传动
手轮-链-槽轮机构组合传动
手轮-V带-离合器-链-槽轮机构组合传动
手轮-锥齿轮-槽轮机构-V带组合传动
手轮-锥齿轮-槽轮机构-链轮组合传动
手轮-锥齿轮-变速器-柱销或滚子链联轴器-链-槽轮机构组合传动
手轮-各种联轴器-链-槽轮机构组合传动
手轮-变速器(中介轮)-离合器-V带组合传动
电机-V带-槽轮机构组合传动
电机-V带-链-槽轮机构组合传动
电机-V带-单十字万向联轴器传动
电机-V带-离合器-链-槽轮机构组合传动
电机-V带-槽轮机构-V带(或链轮)组合传动
电机-V带-滑块联轴器-V带(或链)组合传动
电机-V带-锥齿轮-变速器-柱销或滚子链联轴器-链-槽轮机构组合传动
电机-V带-各种联轴器-链-槽轮机构组合传动
电机-V带-变速器(中介轮)-离合器-V带组合传动
参考图
2)实训内容
a.对各种类型的机械传动的感性认识和理论认识。
b.拼装各种组合传动方案,对比分析不同方案的传动特点。
c.拼装各种类型组合的机械传动,观察各种单级传动,分析其传动原理及特点。
d.对比分析不同组合传动的特点。
3)主要控制
a.共用机械手系统PLC和触摸屏;
b.使用PLC的输出模拟量控制变频器的速度和正反转;
c.利用零部件组合多个传动系统;
4)网络控制框图
机械传动控制分系统通过触摸屏(HMI)、可编程控制器(PLC)、变频器、齿轮、带轮、传送带、手盘等组成(控制框图如下图4.4),其中触摸屏,可编程控制器等安装在主控制台,步进控制器、步进电机、电磁阀等其他部件安装在材料机械手控制分系统上。

图4.4机械传动控制框图
5)主要配置
|
序号 |
名 称 |
型号 |
数 量 |
单位 |
|
10 |
滑动定位机构 |
|
2 |
套 |
|
11 |
定位滑动机构 |
|
2 |
套 |
|
12 |
紧定套圈 |
|
2 |
套 |
|
13 |
工作台面板 |
|
1 |
套 |
|
14 |
小链轮 |
p=12.7 z=15 |
1 |
套 |
|
15 |
大链轮 |
p=12.7 z=20 |
1 |
套 |
|
16 |
滚动轴承座1 |
|
4 |
套 |
|
17 |
支座 |
|
3 |
套 |
|
18 |
半连轴器1 |
|
1 |
套 |
|
19 |
半联轴器2 |
|
1 |
套 |
|
20 |
变速箱墙板 |
|
2 |
套 |
|
21 |
铜套 |
|
共6 |
套 |
|
22 |
花键轴 |
|
2 |
套 |
|
23 |
齿轮1 |
m=2mm z=38 |
1 |
套 |
|
24 |
齿轮2 |
m=2mm z=32 |
1 |
套 |
|
25 |
三联齿轮1 |
m=2mmz=30,46,26 |
1 |
套 |
|
26 |
齿轮3 |
m=2mm z=22 |
1 |
套 |
|
27 |
齿轮4 |
m=2 z=42 |
1 |
套 |
|
28 |
锥齿轮 |
m=3mm z=31 |
2 |
套 |
|
29 |
主动轴 |
|
1 |
套 |
|
30 |
三联齿轮2 |
m=2mmz=27,37,17 |
1 |
套 |
|
31 |
槽轮片 |
|
1 |
套 |
|
32 |
拔盘 |
|
1 |
套 |
|
33 |
轴 |
|
6 |
件 |
|
34 |
小带轮 |
dd=75 |
1 |
套 |
|
35 |
大带轮 |
dd=60 |
1 |
套 |
|
36 |
轴承盖 |
|
8 |
套 |
|
37 |
手提箱 |
|
1 |
台 |
|
38 |
单十字轴万向联合器 |
|
1 |
套 |
|
39 |
三相异步电机 |
|
1 |
台 |
|
40 |
安装标准螺丝,螺帽、垫片 |
|
1 |
套 |
|
41 |
手轮 |
|
1 |
件 |
|
42 |
三角带 |
|
1 |
条 |




